<< SDスコープドッグ・② >>
|
|
|
|
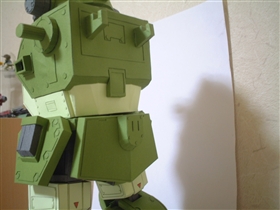
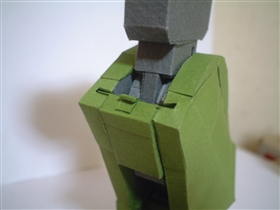
 腰・横ななめ前 |
 腰・前面 |
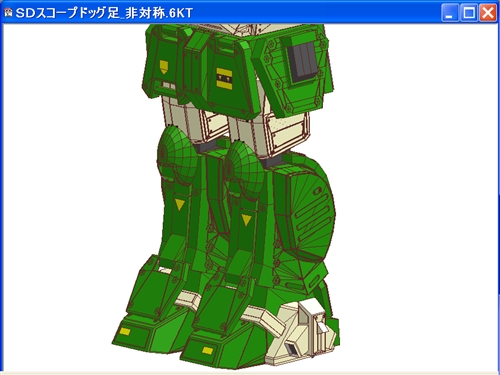
 背面 |
 ふともも |
|
 すね・後ろから |
|
|
|
|
|
|
| TOPページに戻る | 全身のページに戻る |
<< 製作途中 >>
<< SDスコープドッグ・② >>

正面

背面

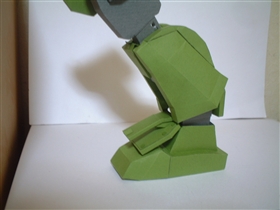
降着ポーズ
( 補助パーツ使用 )
腰・横ななめ前
腰・前面
背面
ふともも
腰・背面から
すね・後ろから

すね

中のフレームが見えます。

つま先

かかと・後ろから
TOPページに戻る
全身のページに戻る
<< 製作途中 >>
 |
 |
 |
 |
 |
 |
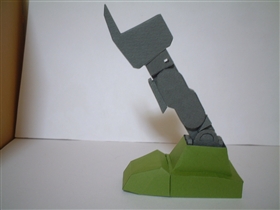
内部フレームの可動
 |
 |
 |
|
↑ |
 |
 |
|
降着状態 |
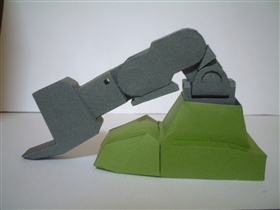 |
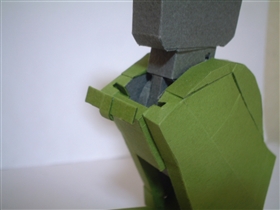
ふとももの付け根の可動ポイント
 |
 |
 |
 |
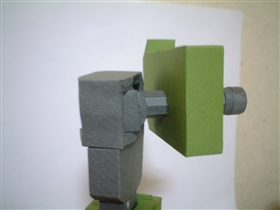
←足の開き・閉じるのは、腰からの軸の |
↑ 水平方向の回転は、中の箱を 回転させてます。 これで、狭いスペースでボールジョイン トのような可動を実現しました。 |
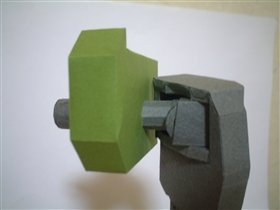
外装をつけての降着状態への、変形過程
 |
 |
 |
↑ ひざを曲げ、ロックを外す。 |
 |
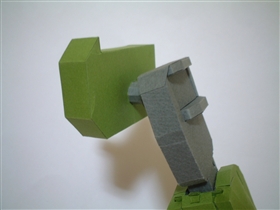
足全体を、前へ倒す。 |
 |
すねの中のフレームを、前へ倒す。 |
 |
ふともものフレームを伸ばす。 |
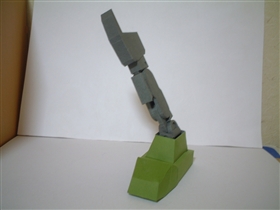
片足完成!!
 |
 |
 |
|
正面 |
後ろから |
このように可動 |
あと、もう片足・腰をこれから製作。
降着ギミックに大きな誤算が発覚!
ひざアーマーを計算に入れてなっかたので、可動域が狭くなり、腰が地面に着かない。
SDのため、ひざアーマーが、降着時につま先の前に行かず、つま先の上になってるのでした。
ひざアーマーなど、各部を強調してあるため、厚みが多くなっているので。
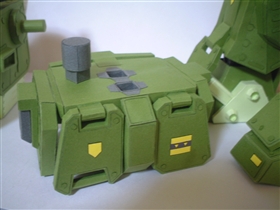
腰の部分を改造予定。それと腰に、補助パーツでいく予定。
(もう片足を作ってから)
 パーツを分けて・・ |
 通常時 |
 降着時は、このポジションに |
スカート後ろの突起も、大きな障害になることもわかりました。
そこで、腰の軸の位置を、差し替えで変えるようにしました。
 |
 |
 |
通常時は中央の穴、降着時は手前の穴にするようにしました。
それでも、腰が床面に着かないので、補助パーツ使用。
( 完成写真の降着ポーズの下に写っている、グレーのパ-ツ )
SDのため、ずんぐりとした体形のためですね。
設計のときに、付属の六角大王での作成のため、動きまでシミュレート
しにくっかったのもあります。
今後のかだいですね。
| TOPページに戻る | 全身のページに戻る |